Гладкая поверхность
Последняя бука буква «ь»
Ответ на вопрос «Гладкая поверхность «, 9 (девять) букв:
плоскость
Альтернативные вопросы в кроссвордах для слова плоскость
Определение слова плоскость в словарях
Энциклопедический словарь, 1998 г. Значение слова в словаре Энциклопедический словарь, 1998 г.
простейшая поверхность. Понятие плоскость (подобно точке и прямой) принадлежит к числу основных понятий геометрии. Плоскость обладает тем свойством, что любая прямая, соединяющая две ее точки, целиком принадлежит ей.
Примеры употребления слова плоскость в литературе.
Если типы и есть, то они существуют не в той плоскости, как это намечается Аарне, а в плоскости структурных особенностей сходных сказок, но об этом после.
В системе не было планет как таковых, однако еще четыре факельщика условного противника обнаружили в засаде в аккреционном диске в плоскости эклиптики.
Говорят, что в последние годы, благодаря успехам отечественной, а может быть, зарубежной химии, для летчиков изобрели что-то такое, что можно лить только на плоскости, но в то отсталое время антиобледенителем был чистый спирт-ректификат.
К району заправки шли сквозь облачность, самолет дважды пересекал зоны обледенения, дважды Тасманов по команде Боровского включал антиобледенители, освобождая от наледи плоскости крыльев и заборники двигателей.
Таким образом, Кант подчеркивает априорность категорий времени и пространства в двух плоскостях: при объяснении опыта и при объяснении науки.
Источник: библиотека Максима Мошкова
Гладкая поверхность (плоскость)
Основные понятия и аксиомы статики
Основные понятия
Статикой называется раздел теоретической механики, в котором излагается общее учение о силах и изучается равновесие материальных тел, находящихся под действием сил.
 Сила
Сила  – мера механического взаимодействия тел, векторная величина, характеризующаяся линией действия nn, точкой приложения A, направлением, модулем (численным значением).
– мера механического взаимодействия тел, векторная величина, характеризующаяся линией действия nn, точкой приложения A, направлением, модулем (численным значением).
Для изображения вектора силы на чертеже в масштабе используют масштабный коэффициент 
Под равновесием понимают состояние покоя тела по отношению к инерциальной системе отсчета, связанной обычно с условно неподвижным телом.
Свободным телом называется тело, движение которого в пространстве не ограничено другими телами. Реально окружающие нас тела являются несвободными, так как их перемещение в пространстве ограничено другими телами.
Тела, ограничивающие свободное перемещение рассматриваемого тела в пространстве, называются связями.
Сила, с которой связь действует на рассматриваемое тело, называется реакцией связи.
В теоретической механике рассматриваются покой или движение только свободных тел. Для этого отбрасывают наложенные на рассматриваемое тело связи и заменяют их реакциями связей. Это принцип освобождаемости от связей.
Совокупность сил, действующих на твердое тело, называется системой сил.
Эквивалентными называются системы сил оказывающие на рассматриваемое тело одинаковое воздействие.
Аксиомы статики
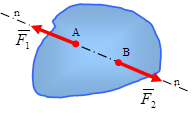 Аксиома 1. Если на свободное абсолютно твердое тело действуют две силы
Аксиома 1. Если на свободное абсолютно твердое тело действуют две силы  , то тело находится в равновесии, если эти силы равны по модулю и противоположно направлены вдоль одной прямой, то есть
, то тело находится в равновесии, если эти силы равны по модулю и противоположно направлены вдоль одной прямой, то есть  .
.
Система сил называется уравновешенной, или эквивалентной нулю, если  .
.
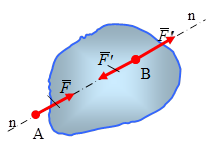 Аксиома 2. Действие системы сил на абсолютно твердое тело не изменится, если к ней добавить или от нее отнять уравновешенную систему сил.
Аксиома 2. Действие системы сил на абсолютно твердое тело не изменится, если к ней добавить или от нее отнять уравновешенную систему сил.
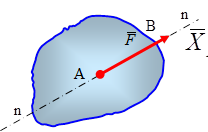
 По линии действия силы приложим уравновешенную систему сил
По линии действия силы приложим уравновешенную систему сил  , а затем отбросим уравновешенную систему сил
, а затем отбросим уравновешенную систему сил  . Сила переместилась по линии ее действия.
. Сила переместилась по линии ее действия.
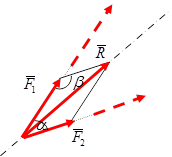
Аксиома 3. Две силы , приложенные к телу, можно заменить одной равнодействующей  эквивалентной этой системе, приложенной в точке пересечения линий действия сил и равной диагонали параллелограмма,построенного на этих силах как на сторонах:
эквивалентной этой системе, приложенной в точке пересечения линий действия сил и равной диагонали параллелограмма,построенного на этих силах как на сторонах:
 .
.
 .
.
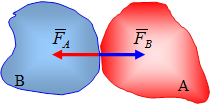 Аксиома 4.Силы
Аксиома 4.Силы  , с которыми два тела А и В действуют друг на друга, равны по модулю и направлены по одной прямой в противоположные стороны, то есть
, с которыми два тела А и В действуют друг на друга, равны по модулю и направлены по одной прямой в противоположные стороны, то есть  (Третий закон Ньютона).
(Третий закон Ньютона).
Но силы не образуют уравновешенную систему сил, так как они приложены к разным телам.
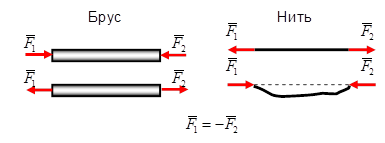
Аксиома 5.Равновесие деформируемого тела не нарушится, если тело считать отвердевшим (принцип отвердевания).
Условия равновесия, являющиеся необходимыми и достаточными для твердого тела,являются необходимыми, но недостаточнымидля деформируемого тела. Например, деформируемая нить находится в равновесии только, если силы ее растягивают, а брус – если силы или сжимают или растягивают его.
1.1.3 Две основные задачи статики:
1. Задача оприведении системы сил заключается в замене данной системы сил другой, наиболее простой, ей эквивалентной.
 2. Задача оравновесии состоит в определении условий, при которых система сил, приложенная к телу, будет уравновешенной.
2. Задача оравновесии состоит в определении условий, при которых система сил, приложенная к телу, будет уравновешенной.
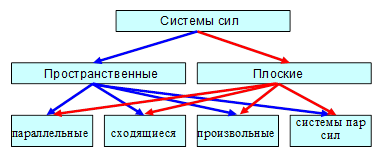
1.1.4 Классификация систем сил:
Виды связей
Рассмотрим наиболее часто встречающиеся типы связей и направления их реакций.
1.2.1 Связи, направления реакций которых заранее известно.
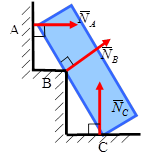
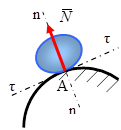
Гладкая поверхность (плоскость)
Реакция  гладкой поверхности (плоскости) или опоры направлена по общей нормали к поверхностям соприкасающихся тел в точке их касания и приложена к этой точке.
гладкой поверхности (плоскости) или опоры направлена по общей нормали к поверхностям соприкасающихся тел в точке их касания и приложена к этой точке.
 |
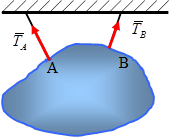 Гибкая связь(нити, канаты, цепи, ремни и т.д.)
Гибкая связь(нити, канаты, цепи, ремни и т.д.)
Реакция  направлена вдоль гибкой связи к точке подвеса.
направлена вдоль гибкой связи к точке подвеса.
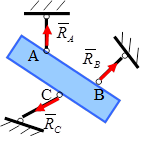 Невесомый стержень (стержневая связь)
Невесомый стержень (стержневая связь)
Реакция невесомого стержня направлена вдоль стержня. Обычно реакция изображается от тела по стержню, в предположении, что в равновесии стержень растянут.
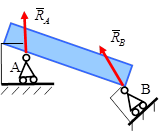 Шарнирно-подвижная опора (опора на катках)
Шарнирно-подвижная опора (опора на катках)
Реакция  проходит через ось шарнира и направлена перпендикулярно к опорной плоскости
проходит через ось шарнира и направлена перпендикулярно к опорной плоскости
1.2.2 Связи, направления реакций которых неизвестны.
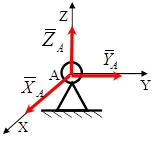
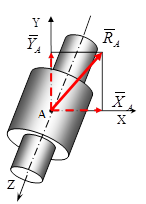 Цилиндрический шарнир, неподвижная шарнирная опора
Цилиндрический шарнир, неподвижная шарнирная опора
Реакция  цилиндрического шарнира может иметь любое направление в плоскости, перпендикулярной оси шарнира (оси вращения), т. е. в плоскости XAY. Обычно раскладывают на две составляющие
цилиндрического шарнира может иметь любое направление в плоскости, перпендикулярной оси шарнира (оси вращения), т. е. в плоскости XAY. Обычно раскладывают на две составляющие  и
и  по двум взаимно перпендикулярным направлениям параллельно осям координат.
по двум взаимно перпендикулярным направлениям параллельно осям координат.
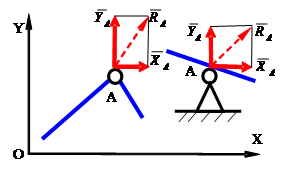 На плоских рисунках цилиндрический шарнир изображают окружностью, а шарнирную неподвижную опору – окружностью на треугольнике.
На плоских рисунках цилиндрический шарнир изображают окружностью, а шарнирную неподвижную опору – окружностью на треугольнике.
В аксонометрии – линиями параллельными оси шарнира со штриховкой.
 |
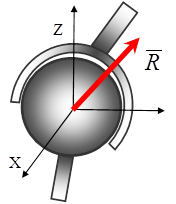 Шаровой (сферический) шарнир
Шаровой (сферический) шарнир
В зависимости от внешней нагрузки реакция шарового шарнира имеет заранее неизвестное направление в пространстве, поэтому ее раскладывают на три составляющие по осям координат  . На аксонометрических рисунках шаровой шарнир изображают окружностью на треугольной опоре со штриховкой
. На аксонометрических рисунках шаровой шарнир изображают окружностью на треугольной опоре со штриховкой 
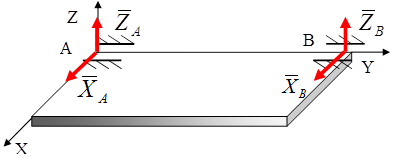
Жесткая заделка
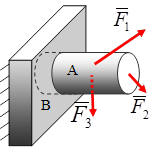 Если рассматриваемое тело A жестко закреплено в другом твердом теле B, то такая связь называется жесткой заделкой. Силы, действующие со стороны тела В на тело А, образуют произвольную (пространственную или плоскую) систему сил, которая приводится к главному вектору и главному моменту, которые можно разложить по осям координат.
Если рассматриваемое тело A жестко закреплено в другом твердом теле B, то такая связь называется жесткой заделкой. Силы, действующие со стороны тела В на тело А, образуют произвольную (пространственную или плоскую) систему сил, которая приводится к главному вектору и главному моменту, которые можно разложить по осям координат.
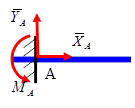 При плоской системе сил, действующей на рассматриваемое тело, нахождение реакции жесткой заделки сводится к определению трех неизвестных величин: составляющих реакции , и алгебраической величины момента MA.
При плоской системе сил, действующей на рассматриваемое тело, нахождение реакции жесткой заделки сводится к определению трех неизвестных величин: составляющих реакции , и алгебраической величины момента MA.
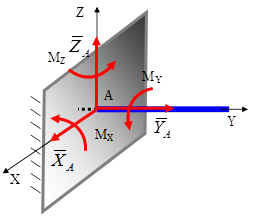 При пространственной системе сил, действующей на рассматриваемое тело, нахождение реакции жесткой заделки сводится к определению шести неизвестных величин: трех составляющих главного вектора реакции заделки и трех составляющих главного момента (суммы моментов сил относительно координатных осей) MX, MY, MZ.
При пространственной системе сил, действующей на рассматриваемое тело, нахождение реакции жесткой заделки сводится к определению шести неизвестных величин: трех составляющих главного вектора реакции заделки и трех составляющих главного момента (суммы моментов сил относительно координатных осей) MX, MY, MZ.
Поверхности
Простые поверхности.
Будем говорить, что функция \(f(u, v)\) непрерывно дифференцируема на замкнутом множестве \(E \subset \boldsymbol
Пусть \(\Omega\) — ограниченная область в \(\boldsymbol
$$
x = \varphi(u, v),\quad y = \psi(u, v),\quad z = \chi(u, v),\quad (u, v) \in \overline<\Omega>,\label
$$
называется непрерывно дифференцируемым.
Если при этом в каждой точке \((u, v) \in \Omega\) ранг функциональной матрицы
$$
\begin
$$
равен двум, то отображение \(F: \rightarrow \boldsymbol
Если \(\overline<\Omega>\) есть замкнутое ограниченное множество в \(\boldsymbol
Пусть область \(\Omega\) ограничена простым гладким или кусочно гладким контуром \(\gamma\). Образ кривой \(\gamma\) при гладком отображении \(F: \overline <\Omega>\rightarrow \boldsymbol
Если уравнение кривой \(\gamma\) имеет вид
$$
u = u(t),\quad v = v(t),\quad \alpha \leq t \leq \beta,\nonumber
$$
то уравнение \(\partial\Sigma\) задается следующими формулами:
$$
x = \varphi(u(t), v(t)),\quad y = \psi(u(t), v(t)),\quad z = \chi(u(t), v(t)),\quad \alpha \leq t \leq \beta.\label
$$
График функции \(z = f(x, y)\), непрерывно дифференцируемой на замкнутом ограниченном множестве \(\overline <\Omega>\subset \boldsymbol
$$
x = u,\quad y = v,\quad z = f(u, v),\quad (u, v) \in \overline<\Omega>.\label
$$
В этом случае матрица \(\begin
Например, график функции \(z = x^ <2>+ y^<2>\), \((x, y) \in \overline<\Omega>\), где \(\overline <\Omega>= \ <(x, y): x^<2>+ y^ <2>\leq 1\>\), есть простая поверхность. Окружность, получаемая при пересечении параболоида вращения \(z = x^ <2>+ y^<2>\) и плоскости \(z = 1\), является краем рассматриваемой простой поверхности.
Уравнения \eqref
$$
\boldsymbol
$$
С механической точки зрения формулы \eqref
Имея в виду приложения теории поверхностных интегралов, введем в рассмотрение класс почти простых поверхностей.
Пусть \(\Omega\) — плоская область и \(F: \overline <\Omega>\rightarrow \boldsymbol
Сфера \(S = \ <(x, y, z): x^<2>+ y^ <2>+ z^ <2>= a^<2>\>\) есть почти простая поверхность.
Образами отрезков \(\varphi = \varphi_<0>\), \(\displaystyle-\frac<\pi> <2>\leq \psi \leq \frac<\pi><2>\) являются меридианы, а при \(\displaystyle|\psi_<0>|  Рис. 52.1
Рис. 52.1
Конус \(K = \ <(x, y, z): x^<2>+ y^ <2>= z^<2>\>\) есть почти простая поверхность.
\(\vartriangle\) Введем цилиндрические координаты. Тогда конус \(K\) есть образ полуполосы
$$
\overline <\Omega>= \ <(r, \varphi): 0 \leq r  Рис. 52.2
Рис. 52.2
Легко проверить, что \(\overline<\Omega>_
Если \(\Sigma\) есть простая поверхность, заданная векторным уравнением \eqref
$$
u = u(u’, v’),\ v = v(u’, v’),\ (u’, v’) \in \Omega’\nonumber
$$
задают взаимно однозначное отображение замыкания области \(\Omega’\) на замыкание ограниченной области \(\Omega\), причем якобиан отображения
$$
\frac<\partial(u, v)> <\partial(u’, v’)>= \begin
$$
отличен от нуля в \(\overline<\Omega>’\), то уравнение
$$
\boldsymbol
$$
определяет ту же простую поверхность, что и уравнение \eqref
Как и в случае кривых, можно расширить класс параметризаций, допуская и такие замены параметров, при которых непрерывная дифференцируемость, взаимная однозначность и необращение в нуль якобиана отображения нарушаются на границе области. Тогда можно получить такие параметризации простой поверхности, задаваемые функциями, непрерывная дифференцируемость которых не имеет места на границе области \(\Omega\).
\(\vartriangle\) Переход от уравнений \eqref
$$
u = a \cos \varphi \cos \psi,\quad v = a \sin \varphi \cos \psi,\quad (\varphi, \psi) \in \Omega’.\label
$$
Якобиан отображения \eqref
Как правило, в дальнейшем для простых поверхностей будут рассматриваться только такие параметризации, которые задаются непрерывно дифференцируемыми на замкнутом ограниченном множестве функциями.
Криволинейные координаты на поверхности.
Пусть простая поверхность \(\Sigma\) задана векторным уравнением \eqref
$$
\boldsymbol
$$
лежащая на поверхности \(\Sigma\). Будем называть ее координатной кривой \(u = u_<0>\). Придавая \(u_<0>\) все значения из отрезка \([a, b]\), получим семейство координатных кривых \(u = \operatorname
 Рис. 52.3
Рис. 52.3
В силу взаимной однозначности отображения \eqref