КАК ПРОШИТЬ PIC КОНТРОЛЛЕР
В данной статье мы разберемся, как же прошить pic-контроллер, на примере металлоискателя Малыш FM. Для достижения данной цели нам потребуется:
1) Компьютер, в котором есть COM порт (ноутбуки не подходят).
3) Прошивающий софт.
Начнем разбираться по порядку.
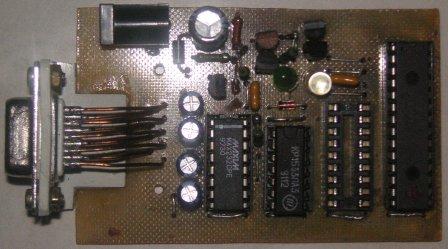
Поиск схемы программатора провел по буржуйским сайтам. В итоге нашёл вот эту схему, развел под нее плату. Схема программатора:

Для более качественного просмотра схемы кликните на изображение. Единственный элемент управления в данной схеме – это переключатель S1, которым включается режим высоковольтного программирования. Хочу заметить то, что в данной схеме программатора общий провод схемы ни в коем случае нельзя объединять с 5 выводом (GND) COM порта. У меня получилась вот такая штуковина.


При подключении программатора к COM порту через удлиняющий кабель, длина последнего не должна превышать 0,5 метра. Прошивающего софта в Интернете навалом, но решил использовать IC-Prog – бесплатная программа. Последняя версия 1.06С от 05.04.2011. На официальном сайте можно скачать и драйвера IC-Prog NT/2000 (не думаю, что кто-то ещё пользуется 98-ми форточками или миллениумом). Если уж хочется поковыряться в данной софтине, то там же можно качнуть русский help. Итак, скачали, разархивировали все в одну папку. Запускаем экзешник, и лезем в настройки программатора Настройки>>Программатор. У меня они выглядят следующим образом.

Далее выполняем настройку самой программы Настройки>>Опции, где важны следующие закладки.



Когда все будет настроено, приступаем к самому процессу прошивки.
Прошивка pic-контроллера
У контроллера PIC12F629 на заводе записана калибровочная константа внутреннего тактового генератора. Ее желательно сохранить, а то вдруг припрет использовать микросхему в другом девайсе, в котором нет кварца. Для этого в IC-Prog выбираем тип контроллера и нажимаем кнопку «Читать микросхему». Константу ищем здесь.

Теперь выбираем файл прошивки Файл>>Открыть файл. В итоге все будет выглядеть вот так.

Небольшое отступление по поводу конфигурации (правая часть окна). Значение конфигурационных битов прописано в даташите на данный контроллер в разделе 9.1, русский перевод качать отсюда www.microchip.ru. Галочки напротив битов конфигурации в IC-Prog означают установку бита в 0. Не трогайте состояние бита MCLR если это не предусмотрено прошивкой! Все значения конфигурации прописываются при написании прошивки. Итак, продолжим. Загрузили прошивку, теперь нажимаем кнопку «Программировать микросхему» и пойдет процесс прошивки. На такой вопрос отвечать «Нет», иначе затрется калибровочная константа.

Осталось дождаться вот такой надписи.

А у кого нет COM порта, то можно прикупить такую штуковину или просто собрать ее самому.

Форум по обсуждению материала КАК ПРОШИТЬ PIC КОНТРОЛЛЕР
 Пайка SMD компонентов 1206, 0805, MELF, SO8, SO14, SO28, TQFP32 в домашних условиях обычным паяльником.
Пайка SMD компонентов 1206, 0805, MELF, SO8, SO14, SO28, TQFP32 в домашних условиях обычным паяльником.
 Описание технологии и зарядное устройство для суперконденсаторов LiCAP.
Описание технологии и зарядное устройство для суперконденсаторов LiCAP.
 Модернизируем промышленный графический эквалайзер Прибой Э-014С.
Модернизируем промышленный графический эквалайзер Прибой Э-014С.
Средства программирования PIC-контроллеров
Введение
PIC-контроллеры остаются популярными в тех случаях, когда требуется создать недорогую компактную систему с низким энергопотреблением, не предъявляющую высоких требований по ее управлению. Эти контроллеры позволяют заменить аппаратную логику гибкими программными средствами, которые взаимодействуют с внешними устройствами через хорошие порты.
Миниатюрные PIC контроллеры хороши для построения преобразователей интерфейсов последовательной передачи данных, для реализации функций «прием – обработка – передача данных» и несложных регуляторов систем автоматического управления.
Компания Microchip распространяет MPLAB — бесплатную интегрированную среду редактирования и отладки программ, которая записывает бинарные файлы в микроконтроллеры PIC через программаторы.
Взаимодействие MPLAB и Matlab/Simulink позволяет разрабатывать программы для PIC-контроллеров в среде Simulink — графического моделирования и анализа динамических систем. В этой работе рассматриваются средства программирования PIC контроллеров: MPLAB, Matlab/Simulink и программатор PIC-KIT3 в следующих разделах.
• Характеристики миниатюрного PIC контроллера PIC12F629
• Интегрированная среда разработки MPLAB IDE
• Подключение Matlab/Simulink к MPLAB
• Подключение программатора PIC-KIT3
Характеристики миниатюрного PIC-контроллера
Семейство РIС12ххх содержит контроллеры в миниатюрном 8–выводном корпусе со встроенным тактовым генератором. Контроллеры имеют RISC–архитектуру и обеспечивают выполнение большинства команд процессора за один машинный цикл.
Для примера, ниже даны характеристики недорогого компактного 8-разрядного контроллера PIC12F629 с многофункциональными портами, малым потреблением и широким диапазоном питания [1].
• Архитектура: RISC
• Напряжение питания VDD: от 2,0В до 5,5В ( >path без аргументов приводит к отображению списка путей переменной path в окне команд (Command Window). Удалить путь из переменной path можно командой rmpath, например:
4. Создайте Simulink модель для PIC контроллера, используя блоки библиотеки «Embedded Target for Microchip dsPIC» (Рис. 13), или загрузите готовую модель, например, Servo_ADC.mdl.
Тип контроллера, для которого разрабатывается Simulink модель, выбирается из списка в блоке Master > PIC (Рис. 16, Рис. 10), который должен быть включен в состав модели.

Рис. 16. Выбор типа контроллера в блоке Master модели.
Рис. 17. Выбор компилятора S-функций dspic.tlc для моделей PIC-контроллеров в разделе «основное меню → Simulation → Configuration Parameters → Code Generation».
6. Откомпилируйте модель tmp_Servo_ADC.mdl. Запуск компилятора показан на Рис. 18.
Рис. 18. Запуск компилятора Simulink модели.
В результате успешной компиляции (сообщение: ### Successful completion of build procedure for model: Servo_ADC) в текущем каталоге создаются HEX файл для прошивки PIC контроллера и MCP проект среды MPLAB (Рис. 19).
Рис. 19. Результаты компиляции модели.
Запуск модели в Matlab/Simulink выполняется в окне модели кнопкой, условное время моделирования устанавливается в строке:
Управление компиляцией Simulink моделей из среды MPLAB
Управление компиляцией Simulink модели можно выполнять командами раздела Matlab/Simulink среды MPLAB, например, в следующем порядке.
1. Разработайте модель PIC контроллера в Matlab/Simulink. Сохраните модель.
2. Запустите MPLAB.
3. Выберите MPLAB меню → Tools → Matlab/Simulink и новый раздел появится в составе меню.
4. В разделе Matlab/Simulink откройте Simulink модель, например, Servo_ADC, командой «Matlab/Simulink → Specify Simulink Model Name → Open → File name → Servo_ADC.mdl → Open». Команда Open запускает Matlab и открывает модель.
5. Откомпилируйте модель и создайте MCP проект командами Generate Codes или Generate Codes and Import Files. Перевод MDL модели в MCP проект выполняется TLC компилятором Matlab.
В результате создаётся проект MPLAB:
со скриптами модели на языке Си.
6. Откройте проект: меню → Project → Open → Servo_ADC.mcp (Рис. 20).
Рис. 20. Структура MCP проекта Simulink модели Servo_ADC.mdl в среде MPLAB.
Проект Simulink модели готов для редактирования, отладки и компиляции в машинные коды контроллера средствами MPLAB.
Подключение программатора PIC-KIT3
Узнать какие программаторы записывают бинарный код в конкретный микроконтроллер можно в разделе меню → Configure → Select Device среды MPLAB 8.92. Например, программатор PIC-KIT3 не поддерживает контроллер PIC12C508A (Рис. 21, левый рисунок), но работает с контроллером PIC12F629 (Рис. 21, правый рисунок).
Рис. 21. Перечень программаторов для прошивки микроконтроллера.
Информацию об установленном драйвере программатора PIC-KIT3 можно запросить у менеджера устройств ОС Windows (Рис. 22).
Рис. 22. Информация об установленном драйвере программатора PIC-KIT3.
Схема подключения микроконтроллера PIC12F629 к программатору PIC-KIT3 показана на Рис. 23.
Рис. 23. Схема подключения микроконтроллера PIC12F629 к программатору PIC-KIT3.
Вывод PGM программатора для прошивки контроллеров PIC12F629 не используется. Наличие вывода PGM для разных типов PIC контроллеров показано на Рис. 24. Вывод PGM рекомендуется «притягивать» к общему проводу (GND), через резистор, номиналом 1К [3].
Рис. 24. Выводы PGM PIC контроллеров.
Индикация светодиодов программатора Olimex PIC-KIT3 показана в ниже:
Желтый — Красный — Состояние программатора
Вкл — Выкл — Подключен к USB линии
Вкл — Вкл — Взаимодействие с MPLAB
Мигает — Включен постоянно — Прошивка микроконтроллера
Не следует подключать питание микроконтроллера VDD (Рис. 23) к программатору, если контроллер запитывается от своего источника питания.
При питании микроконтроллера от программатора на линии VDD необходимо установить рабочее напряжение, например, 5В программой MPLAB (Menu → Programmer → Settings → Power), как показано на Рис. 25.
Примечание. При отсутствии напряжения на линии VDD MPLAB IDE выдает сообщение об ошибке: PK3Err0045: You must connect to a target device to use
Рис. 25. Установка напряжения VDD на программаторе PIC-KIT3 программой MPLAB IDE v8.92.
Если программатор не может установить требуемое напряжение, например, 5В при его питании от USB, в которой напряжение меньше 5В, MPLAB IDE выдает сообщение об ошибке: PK3Err0035: Failed to get Device ID. В этом случае, сначала необходимо измерить напряжение программатора — считать его в закладке меню → Programmer → Settings → Status, а затем установить напряжение (не больше измеренного) в закладке меню → Programmer → Settings → Power.
Рис. 26. Измерение (слева) и установка (справа) VDD напряжения программатора PIC-KIT3 программой MPLAB IDE v8.92.
Пример MPLAB сообщения успешного подключения микроконтроллера к программатору по команде меню → Programmer → Reconnect показан на Рис. 27.
Рис. 27. Сообщение MPLAB об успешном подключении микроконтроллера к программатору.
Можно программировать не только отдельный PIC контроллер, но и контроллер, находящийся в составе рабочего устройства. Для программирования PIC контроллера в составе устройства необходимо предусмотреть установку перемычек и токоограничивающих резисторов как показано на Рис. 28 [3].
Рис. 28. Подключение микроконтроллера в составе электронного устройства к программатору.
Заключение
Малоразрядные PIC-контроллеры имеют широкий диапазон питания, низкое потребление и малые габариты. Они программируются на языках низкого уровня. Разработка программ на языке графического программирования Simulink с использованием многочисленных библиотек значительно сокращает время разработки и отладки в сравнении с программированием на уровне ассемблера. Разработанные для PIC-контроллеров Simulink структуры можно использовать и для компьютерного моделирования динамических систем с участием контроллеров. Однако, из-за избыточности кода такой подход применим только для семейств PIC контроллеров с достаточными ресурсами.
Как прошить микроконтроллер PIC?
Работа с программой PicKit2 Programmer

Если вы уже собрали USB программатор PIC своими руками, то пора научиться им пользоваться. Для этого нам необходимо установить программную оболочку «PICkit 2 Programmer», которая разрабатывалась специально для управления программатором PICkit2.
Итак, если программа установлена, приступим к изучению её возможностей.
Устанавливаем микроконтроллер в панель программации, подключаем программатор к компьютеру и запускаем «PICkit 2 Programmer».

При запуске программа производит опрос программатора и автоматически определяет тип программируемого микроконтроллера по идентификационным битам (так называемому device ID). Внимание! Микросхемы семейства Baseline, а также микросхемы EEPROM и KeeLOG не имеют device ID. Чтобы программа смогла работать с этими микросхемами, нужно выбрать конкретное изделие через меню «Device Family».

Если вместо такой дружелюбной картинки покажется вот такая.

Открытие файла с прошивкой.

Затем выбрать в открывшемся окне нужный файл прошивки.


Запись программы в МК.

Об успешном выполнении процедуры записи уведомит надпись «Programming Successful».

Для большей уверенности можно провести процедуру проверки. При нажатии на кнопку «Verify» программа сравнивает данные hex-файла и данные, записанные в МК. Если верификация прошла успешно, то в окне сообщений появится надпись «Verification Successful».
Внимание! Если вы прошиваете микроконтроллеры PIC12F675, PIC12F629 и аналогичные с внутренним тактовым генератором, то при верификации может выскакивать ошибка. Дело в том, что PICkit2 Programmer (версии 6.21) сохраняет калибровочную константу, а затем записывает её в последнюю ячейку памяти МК. Понятно, что исходный файл прошивки и записанные данные в памяти будут отличаться. О калибровочной константе будет рассказано далее.
Быстрые кнопки.
Кнопка «Auto Import Hex + Write Device» понравиться тем, кто хочет «загонять прошивку» в МК нажатием одной кнопки. Один щелчок и программа предложит выбрать файл прошивки, а затем незамедлительно запишет её в МК.


Изменение битов конфигурации.
Биты конфигурации задают основные параметры работы МК. Это и тип генератора (кварц, RC-цепь), включение/отключение так называемого «сторожевого таймера», установка защиты от считывания памяти программ и некоторые другие. Как правило, при написании алгоритма работы МК (программы) прописываются значения, которые нужно записать в биты конфигурации. При «прошивке» программная оболочка берёт данные о конфигурации из самого файла прошивки и принудительно указывать эти данные не требуется.
Но, нам, как начинающим не будет лишним знать, как можно просмотреть или изменить конкретные биты конфигурации. Для этого щёлкаем по надписи «Configuration». Откроется окно редактирования битов конфигурации.

Выбор модели микроконтроллера.
Микроконтроллеры бывают разные. Поэтому при программировании МК бывает необходимость указать конкретную модель микроконтроллера. При выборе пункта меню «Device Family» выпадает список семейств микроконтроллеров. Есть среди этого списка и микросхемы памяти EEPROM.

Далее выбираем конкретную марку микросхемы в выпадающем списке «-Select Part-«. Как видим, у нас микросхема 24LC08B (аналоги 24C08, 24WC08L и др.).

Чтобы считать данные с микросхемы EEPROM жмём «Read». Если в памяти записаны данные, то в окне «Program Memory» значения обновятся.

Кнопки «Write» (считать), «Erase» (стереть) выполняют соответствующие функции.
Калибровочная константа.
На заводе в память таких микроконтроллеров записывается специальная константа, которая задаёт параметры встроенного генератора на 4 МГц. Эта калибровочная константа вида 34хх записывается в последнюю ячейку памяти программ по адресу 0x3FF.
При программировании микроконтроллера эту константу легко стереть. И хоть PICkit2 Programmer версии 2.61 автоматически сохраняет эту константу и затем записывает её при программации, не лишним будет записать значение константы OSCCAL.


В поле «OSCCAL value» указываем ранее записанное значение константы. Жмём кнопку «Set» (установить).
Теперь, когда вы знакомы с основными возможностями PICkit2 Programmer, можно смело начать сборку какого-нибудь устройства на микроконтроллере, например, RGB-светильника на PIC12F629/675.
Универсальный программатор PIC-контроллеров
PIC- контроллеры фирмы Microchip: PIC12C508, PIC12C508A, PIC12C509, PIC12C509A, PIC12CE518, PIC12CE519, PIC12C671, PIC12C672, PIC12CE673, PIC12CE674, PIC12F629, PIC12F675, PIC16C433, PIC16C61, PIC16C62A, PIC16C62B, PIC16C63, PIC16C63A, PIC16C64A, PIC16C65A, PIC16C65B, PIC16C66, PIC16C67, PIC16C71, PIC16C72, PIC16C72A, PIC16C73A, PIC16C73B, PIC16C74A, PIC16C74B, PIC16C76, PIC16C77, PIC16F72, PIC16F73, PIC16F74, PIC16F76, PIC16F77, PIC16C84, PIC16F83, PIC16F84, PIC16F84A, PIC16F88, PIC16C505*, PIC16C620, PIC16C620A, PIC16C621, PIC16C621A, PIC16C622, PIC16C622A, PIC16CE623, PIC16CE624, PIC16CE625, PIC16F627, PIC16F628, PIC16F628A, PIC16F630*, PIC16F648A, PIC16F676*, PIC16C710, PIC16C711, PIC16C712, PIC16C715, PIC16C716, PIC16C717, PIC16C745, PIC16C765, PIC16C770*, PIC16C771*, PIC16C773, PIC16C774, PIC16C781*, PIC16C782*, PIC16F818, PIC16F819, PIC16F870, PIC16F871, PIC16F872, PIC16F873, PIC16F873A, PIC16F874, PIC16F874A, PIC16F876, PIC16F876A, PIC16F877, PIC16F877A, PIC16C923*, PIC16C924*, PIC18F242, PIC18F248, PIC18F252, PIC18F258, PIC18F442, PIC18F448, PIC18F452, PIC18F458, PIC18F1220, PIC18F1320, PIC18F2320, PIC18F4320, PIC18F4539, PIC18F6620*, PIC18F6720*, PIC18F8620*, PIC18F8720*
Примечание: микроконтроллеры, помеченные звездочкой (*) подключаются к программатору только через разъем ICSP.
Последовательная память EEPROM I2C (IIC): X24C01, 24C01A, 24C02, 24C04, 24C08, 24C16, 24C32, 24C64, AT24C128, M24C128, AT24C256, M24C256, AT24C512.
Расположение выводов ICSP у PIC-контроллеров.
Внимание! Материал только для общей справки. Обязательно убедитесь, что указанное расположение выводов соответствует выбранному вами микроконтроллеру. Для этого, обратитесь к Data Sheets и Programming Specifications на соответствующий микроконтроллер.
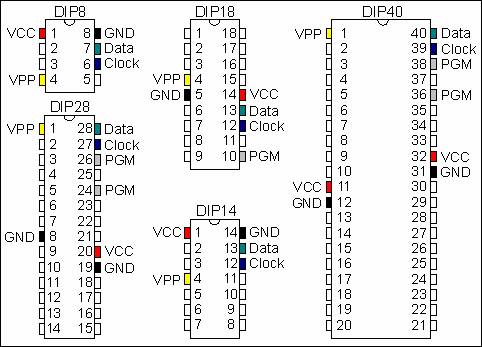
Пояснение: Вывод PGM рекомендуется «притягивать» к общему проводу (GND), через резистор номиналом 1К.
Для справки: микроконтроллеры с 14-контактным корпусом вставляется частью ножек в соответствующую 8-контактную панель.
Рисунок печатной платы (облегченный вариант) (скачать в Sprint Layout ).
Рисунок печатной платы (полная версия) (скачать в Sprint Layout ).
Фотография собранного программатора (облегченный вариант)

Вариант 1 (скачать в Sprint Layout ).
Вариант 2 (скачать в Sprint Layout ).
Вариант от MARKO (скачать в Sprint Layout).
Автор il86md (at) mail.ru
Автор sound65 (at) rambler.ru он же greeze (at) inbox.ru
Альтернативный вариант (+ сменные модули) от markomar2005 (at) yandex.ru
 |  |
Вариант от alex_vw (at) mail.ru
Введение. Данная инструкция составлена на примере прошивки микросхемы PIC16F876A для сборки универсального многоканального АЦП.
4. Настройте программу.
Для Windows95, 98, ME
Для Windows NT, 2000, XP
(Только для Windows XP):
Правой кнопкой щёлкните на файле icprog.exe.
«Свойства» >> вкладка «Совместимость» >>
Установите «галочку» на «Запустить программу в режиме совместимости с:» >> выберите «Windows 2000«.
«Настройки» >> «Программатор«.
Проверьте установки, выберите используемый вами COM-порт, нажмите «Ok«.
Далее, «Настройки» >> «Опции» >> выберите вкладку «Общие» >> установите «галочку» на пункте «Вкл. NT/2000/XP драйвер» >> Нажмите «Ok» >>
если драйвер до этого не был установлен в системе, в появившемся окне «Confirm» нажмите «Ok«. Драйвер установится, и оболочка программатора перезапустится.
Примечание:
Для очень «быстрых» компьютеров возможно потребуется увеличить параметр «Задержка Ввода/Вывода«. Увеличение этого параметра увеличивает надёжность программирования, однако, увеличивается и время, затрачиваемое на программирование микросхемы.
«Настройки» >> «Опции» >> выберите вкладку «I2C» >> установите «галочки» на пунктах:
«Включить MCLR как VCC» и «Включить запись блоками«. Нажмите «Ok«.
Программа готова к работе.
Вот и всё. Я тоже думал, что это что-то невероятное. Попробуйте – и у вас получится.